In 3D space we define a point/coordinate by its components (x,y,z) where all components have the same unit. We can do this also in 4D space time by an event (ct,x,y,z) as ct has unit length (it should be called time space by this ordering, but what ever). The same unit for all components is needed if we want to do geometry with the coordinates.
If we want to measure distances Δs between two points (x1,y1,z1) and (x2,y2,z2) we do this in 3D Euclidean space as Δs2=(x2−x1)2+(y2−y1)2+(z2−z1)2=Δx2+Δy2+Δz2. These distances are Galileo invariant, observer S and S′ moving with V measure the same distance Δs2=Δs′2. Note that we take these two points at the same time t: t1=t2. Or rephrased: we perform the measurement in the rest frame of the object we measure. That makes sense: measuring the length of an object that is moving requires that we measure the left and right side at the same time. Otherwise, the motion of the object will interfere with our measurements of the length.
The above statement is easily shown by invoking the Galilean Transformation:
If we want to measure distances in space time and require that the distance is now Lorentz invariant, we cannot measure distance the same way! If we measure in S the positions at the same time, that will in general be at different times according to S′. Time is relative.
To do geometry, measure angles etc. we need an inner product and the inner product provides a distance measure (a metric) by the norm. For 3D you know that for two vectors r1 and r2: Δs2=∣∣r1−r2∣∣2=(r1−r2)⋅(r1−r2)=Δx2+Δy2+Δz2. Clearly the inner product in 4D space time cannot be defined in the same way.
We want that two relativistic observers measure the same distance (e.g. between two events), that is, it must be Lorentz invariant. We start by noting that the speed of light is constant for both observers. A light wave traveling in S and S′ must therefore obey
It is straightforward to show that the above distance ds2 is indeed a Lorentz Invariant, i.e. ds′2=ds2. Suppose we have two events: E1:(ct,x,y,z) and E2:(c(t+dt),x+dx,y+dy,z+dz). We can transform these to S′ via the standard Lorentz Transformation:
The idea of having to work with a ‘position’ vector with 4 components with an inner product as discussed above, is generalized to vectors, i.e. quantities with a direction and a magnitude.
We define a 4-vector A=Aμ=(A0,A1,A2,A3) to be a vector that transforms between two observers S and S′ moving with V along the x-direction by the LT
Other tuples of 4 values are not 4-vectors. The requirement that the 4-vector must transform via the LT is essential. We will use this later for the 4-velocity and 4-momentum.
This notation is just to a make clear distinction with 3-vectors that only have spatial coordinates. With a Greek index μ,Aμ we indicate all 4 components of the vector, while with a Latin index k,Ak we only indicate the spatial components. We also start counting at 0 for the first component, which is ‘time’.
The inner product between two 4-vectors A,B is now defined according to the rule we already saw before
This is not a “choice” for the inner product, but follows strictly from the requirement that distance or length should not change under LT. A space with this inner product is called a Minkowski space or the space has a Minkowski metric after Hermann Minkowski.
Notice that time component (+) is treated differently than the spatial components (−) in the inner product. Sometimes the inner product is also called pseudo Euclidean as there are -1 and +1 present in the inner product (instead of only +1 for Euclidean space).
This property can be a very powerful tool (OK, we constructed it that way). If we know the value of the inner product in one frame of reference, it will be the same in all other inertial frames of reference! We will use that later often. It is also clear that the distance interval ds2 is a Lorentz invariant.
Inner product LT invariant: the hard way
If you do not believe that the inner product is LT invariant you can write it out of course (with β≡cV, a short hand notation that is frequently used).
We compute A′⋅B′. We will concentrate on only A0B0−A1B1, as with the standard Lorentz Transformation the A2 and A3 component are trivial (and left out).
Let us consider an event in space time X=Xμ=(ct,x,y,z)=(x0,x1,x2,x3). For sake of simplicity we only consider one space like component here. In the sketch we have the space axis (x or x1) to the right and the time axis (ct or x0) up. We consider three events A,B,C (points in space time) and their connection to the origin O
OA: The point A can be reached from O with velocity v<c, therefore it is called causally connected or time like. For the distance OA:Δs2, we see from projection of the coordinates A onto the time and space axis ∣xA−0∣<(ctA−0)⇒Δs2>0. Because the time component is larger than the space component, it is called time like. The distance is positive.
OB: The point B can be reached from O only with velocity v>c, therefore it is called non-causally connected or space like. For the distance OB:Δs2, we see from projection of the coordinates B onto the time and space axis ∣xB−0∣>(ctB−0)⇒Δs2<0. Because the space component is larger than the time component, it is called space like. The distance squared is negative.
OC: The point C can be reached from O only with velocity v=c, therefore it is called light like or null. For the distance OB:Δs2, we see from projection of the coordinates C onto the time and space axis ∣xC−0∣=(ctC−0)⇒Δs2=0. Because the space component is equal to the time component, it is called light like. The distance is zero. Therefore it is also called null.
Here you can observe that the sign of the distance using the Minkowski inner product classifies parts of space time.
This is even more evident if you look at the light cone in the sketch. The cone mantel is generated by revolving the line x=ct, a light line. Here only a 2D cone is shown (ct,x,y), but of course this should be a 3D cone (ct,x,y,z). The inside of the cone at negative times is the past that could have influenced me at now. My now can influence my future (inside the cone to positive times). All the rest, outside the cone is not causally connected to me.
Now we can have a look at world lines of an observer S′ with respect to S traveling with V along the x−axis in a graphical manner. The world line of an object is the path that an object travels in the 4-dimensional spacetime.
We plot the coordinate system of S′ (blue) in the coordinate system of S (black).
The time line of S′ in S is given by the fact that x′=0. From the LT we have x′=γ(x−cVct)=0⇒x=cVct. The angle α of the ct′-line with the ct axis is given by tanα=cV.
The space line of S′ in S is given by the fact that ct′=0. From the LT we have ct′=γ(ct−cVx)=0⇒ct=cVx. The angle α of the x′-line with the x axis is given by tanα=cV.
Both lines of S′ make the same angle α with the coordinates axis of S. They lie symmetric around the light line x=ct (diagonal with α=45°). The higher the speed V the higher the angle and the closer the lines lie to the light line. See the animation below, where the (ct′,x′) axis are plotted in the (ct,x) diagram of S for different values of V/c.
To further investigate how this plot can help us, let us consider lines of equal time in S. These are just the lines perpendicular to the ct-axis, and parallel to the x-axis, as you expect. And of course, lines parallel to ct, perpendicular to x are lines of constant space coordinate.
Figure 8:Left: lines of equal time (green) and equal space coordinate (red) in frame of reference S (left) and S′ (right).
For the frame of reference S′ that is a bit different.
Lines of constant time in S′ are parallel to x′
Lines of constant space coordinate in S′ are parallel to ct′
With this information in hand, we can investigate how events are transferred from S to S′. We can graphically do a LT without the explicit computation.
In the animation below, we see the effect of different values of V/c on the lines of constant ct′ and x′ as seen by S. For clarity, these are only drawn for V/c≥0
We will now take a look back at the ladder and barn paradox. We had a barn of 10m wide and a ladder of 26m long (both measured in their rest frame). The ladder was moving towards the barn with high velocity. We start by drawing the barn S (black) and ladder S′ (blue) coordinate systems in the Minkowski diagram. Now we add the barn world line into the diagram (light blue) with two lines of constant space coordinate (parallel to ct) in S.
Now we can add the ladder to S′. It has rest length of 26m and in the (x′,ct′) plane it is a world line of constant space coordinate, therefore parallel to ct′. The ladder itself is a line of constant time in ct′ and therefore parallel to x′.
As the ladder moves (we move it parallel to x′ between the world lines) it will eventually enter the barn and hit the right door of the barn (dashed red line, Figure 12). This event is indicated by the space time point A. For S′ the other end of the ladder is then still outside the barn at space time point C. According to S′ the ladder does not fit into the barn.
When the ladder hits the right door for S at space time point A, he makes a measurement of the ladder. To this end we draw a line of constant time (dashed light blue, parallel to x) until it intersects the world line of the ladder at space time point B. Observer S measures that the ladder fits into the barn.
From this diagram it is obvious that the events B and C are not the same, therefore it is not strange that S and S′ disagree about the outcome of the measurement. Both are right! But they would not be able to agree that both doors shut at the same time, to capture the ladder.
Let there be Alice and Bob who are twins. Bob leaves earth in a spaceship with relativistic speed v, while Alice remains back home on earth. At some time Bob turns around, with −v and comes back to Alice. Based on time dilation Alice will argue that Bob is younger than she due to ΔT=γΔT0. For the γ-factor it does not matter if Bob is moving away or approaching as it is quadratic in the velocity. For each year she ages, her brother only ages 1/γ years. Bob can argue that due to the principle of relativity, he is at rest and his twin sister is moving away and then coming back, therefore she will be younger than he - and we have a paradox.
This paradox has two issues:
The principle of relativity is not applicable as Bob must turn around. This requires acceleration of his frame and breaks the symmetry of the problem.
Bob will be younger than Alice, due to the relativity of simultaneity changing around the turning point. We can see this by looking at the Minkowski-diagram below. Just before Bob is turning around, his line of simultaneity is x′, but just after turning around his line of simultaneity is x′′. On the time line of Alice, Bob lines of simultaneity first is at point A, but then makes a jump around the turning point to B. Bob will be younger than Alice, by the length of this jump on her time line from A to B.
Extra: We symmetries the problem. Both Alice and Bob move in spaceships away from each other at the same but opposite speed, then turn around and meet again. Who is older now?
Answer
They are the same age. You can now reason with symmetry even though both are accelerated. You can also draw the Minkowski-diagram similar to the above and see that both make the same “jump” in the time, and thus are the same age.
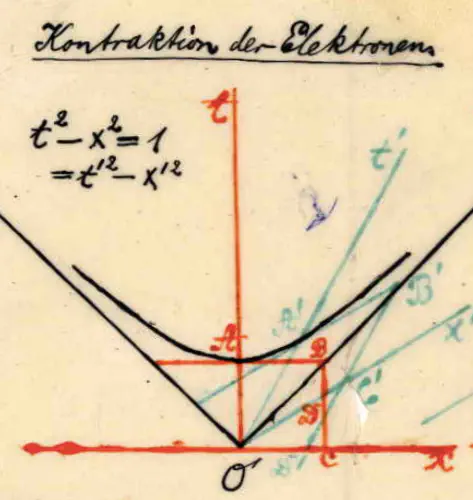
We have seen that the length interval ds2 is a Lorentz invariant. Therefore we can use it to also indicate corresponding time and space units in a Minkowski diagram for two moving observers. If we fix ds2 then the equation ds2=c2dt2−dx2 describes a hyperbola in (ct,x) of the Minkowski diagram.
For ds2<0 we find the corresponding space units (the interval is space-like), and for ds2>0 the corresponding time units (the interval is time-like). All hyperbola have the light line ds2=0 as asymptotes.
You can think of the LT as a rotation of the 4 coordinates of Minkowski space time. Obviously it is not a “normal” rotation with a rotation matrixR∈SO(n) as we encountered in change to polar coordinates.
The LT in matrix notation reads as follows with γ=1−β21 and β=V/c.
The matrix transfers the space time coordinates between two observers moving with V. From this it is clear that transferring between more than two observers S→S′→S′′→… can be done easily by multiplying the respective Lorentz transformation matrices into one overall LT. This must be possible, of course, as the LT is a linear transformation in space time (ct,x).
From the matrix notation it is also clear that for rotations around “different axis”, speeds in x,y,z direction, the order of change of frame matters as matrix multiplication does not commute.
In 3D normal space, distance is preserved under rotation with R∈SO(n), in Minkowski space distance is preserved under Lorentz transformation which too is a rotation.
You can see the rotation clearer if we introduce the quantity rapidityα, which is defined as tanhα≡cV (a relativistic generalization of the modulus of the velocity going from 0 for v=0 to ∞ for v=c). We will not use the rapidity except here, however, it is used for relativistic velocity decompositions. With tanhα=cV we can write the Lorentz transformation as (using γ=1−tanh2α1=coshα and γβ=1−tanh2αtanhα=sinhα)
Notice the similarity to the rotation with sine and cosine.
With that LT is a rotation in hyperbolic space with “angle” α (where α is the rapidity), we identify the matrix as L(α). That the hyperbolic functions appear should not be a surprise as they are equivalent to the sine and cosine for the circle, (ct2+x2=1), for the hyperbola (ct2−x2=1). Notice the relation to the inner products for standard and Minkowski space.
Minkowski made the sketch below to show that the Lorentz transformation is a rotation over a hyperbola not a circle as we were used to. The asymptotes of the hyperbola are given by the light lines.
The addition of velocities that we derived earlier is easy with this notation with rotations and rapidity L(α1)L(α2)=L(α1+α2). In terms of speeds this reads